Гидробот ГД. Этап 1. Упрощение исходной геометрии
Первый пост из серии про мой проект с Гидроботом.
С чего всё началось
Вместе с компанией Гидробот (gidrobot.ru), специализирующейся на подводной робототехнике, мы модернизируем одну из их систем с помощью технологии генеративного дизайна.
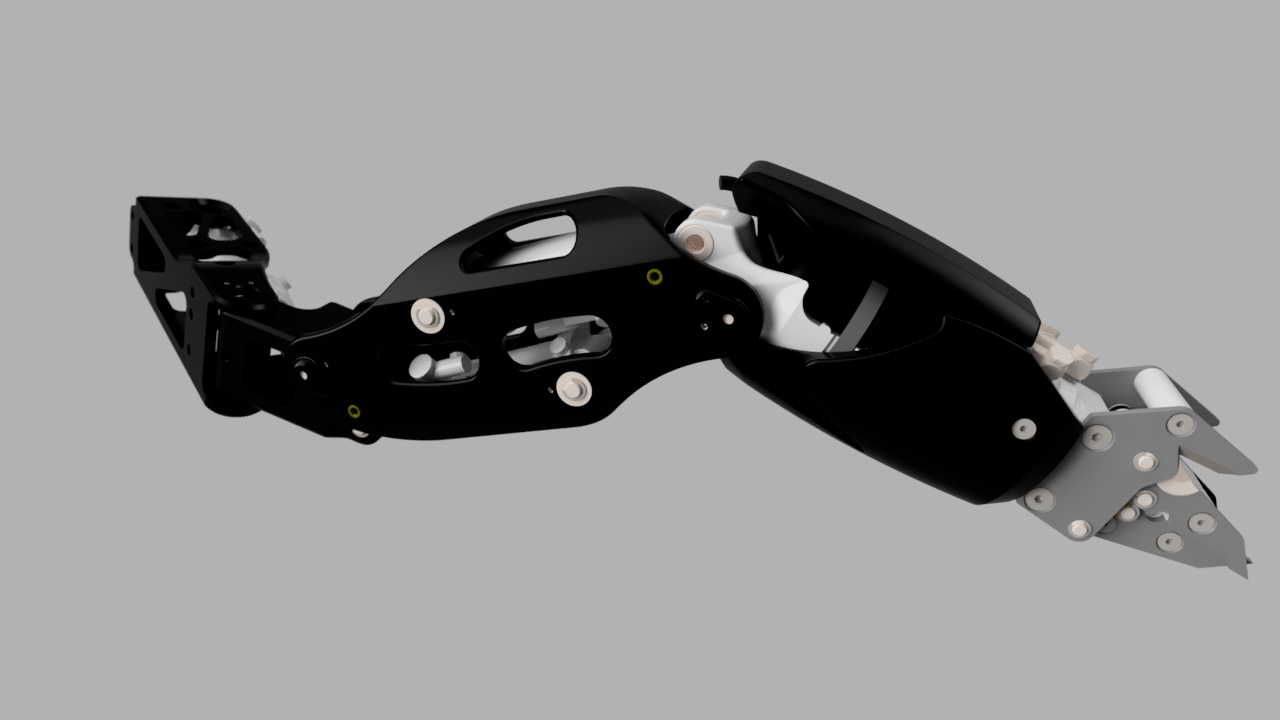
Моя роль в проекте - переосмысление детали подводного манипулятора. Необходимо повысить надежность элемента при одновременном снижении его массы и плюс исследовать возможность применения альтернативных материалов.
В этом проекте мы будет на полную использовать Fusion 360 Generative Design. Деталь должна выдерживать заданные нагрузки и удовлетворять очень жестким ограничениям по геометрии.
Упрощение исходной геометрии
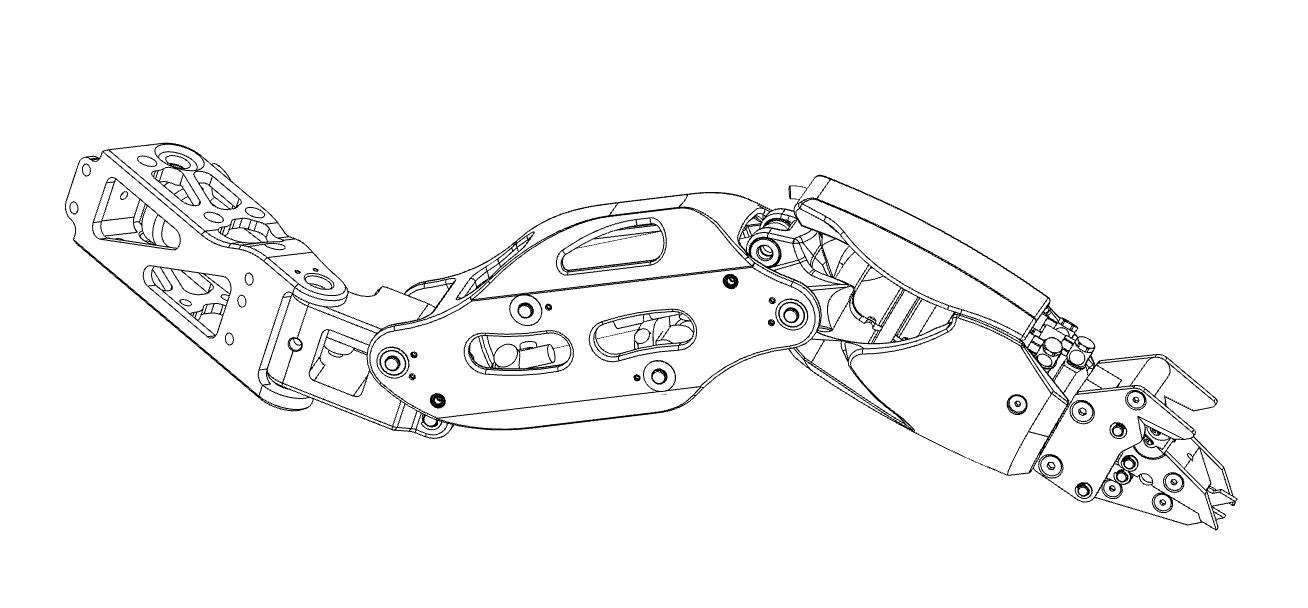
Первый шаг в любом проекте, где есть импортированная геометрия, - это её упрощение.
Это важный шаг, который с одной стороны помогает сосредоточиться на том что важно, с другой, чисто технической стороны, упрощает дальнейшую работу с моделью.
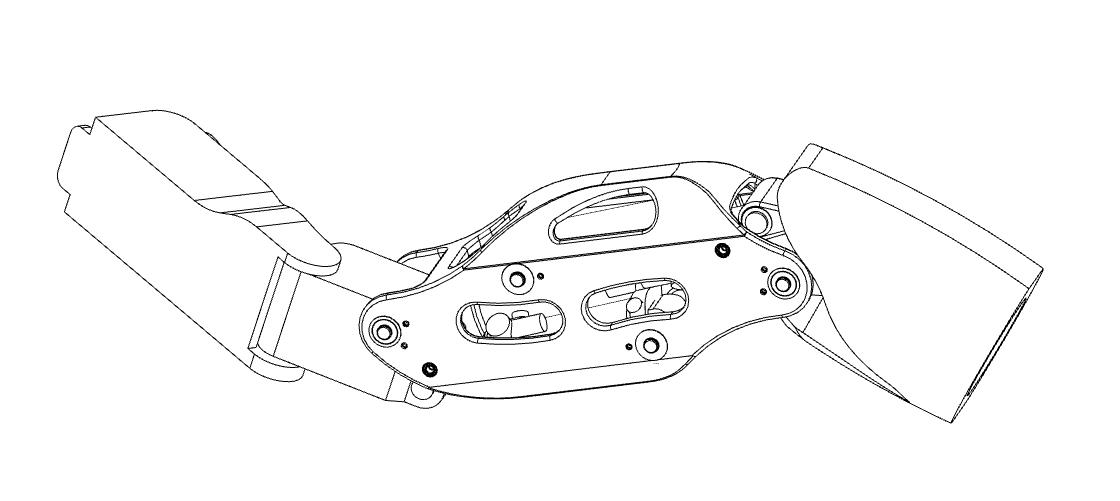
Процесс упрощения выглядит как просто удаление скруглений, отверстий и мелких элементов. Однако этот шаг необходимо выполнять с пониманием того, какая геометрия понадобится на следующих этапах.
Например, если упрощенная геометрия должна быть использоване в сборке, важно сохранить элементы, по которым затем будут делаться соединения. Как правило для этого я создаю эскизы и Joint Origin в корневом компоненте модели.
Упрощение удобнее делать в режиме без истории во Fusion 360, иногда переключаясь в режим с историей чтобы использовать инструменты Simplify, которые пока недоступны без таймлайна - в частности Remove Features.
Чтобы сохранить исходную геометрию на случай, если что-то пойдет не так, я делаю ее копию в отдельном компоненте. Это помогает в одной модели иметь одновременно и упрощенную, и исходную геометрию, переключаясь между ними при необходимости.
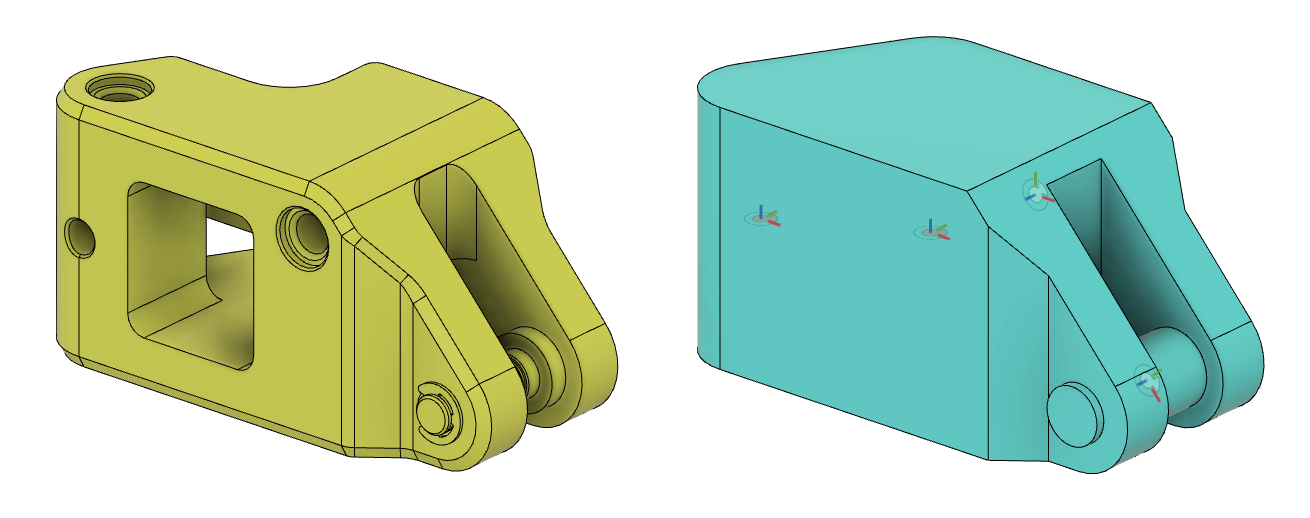
Структура модели после упрощения
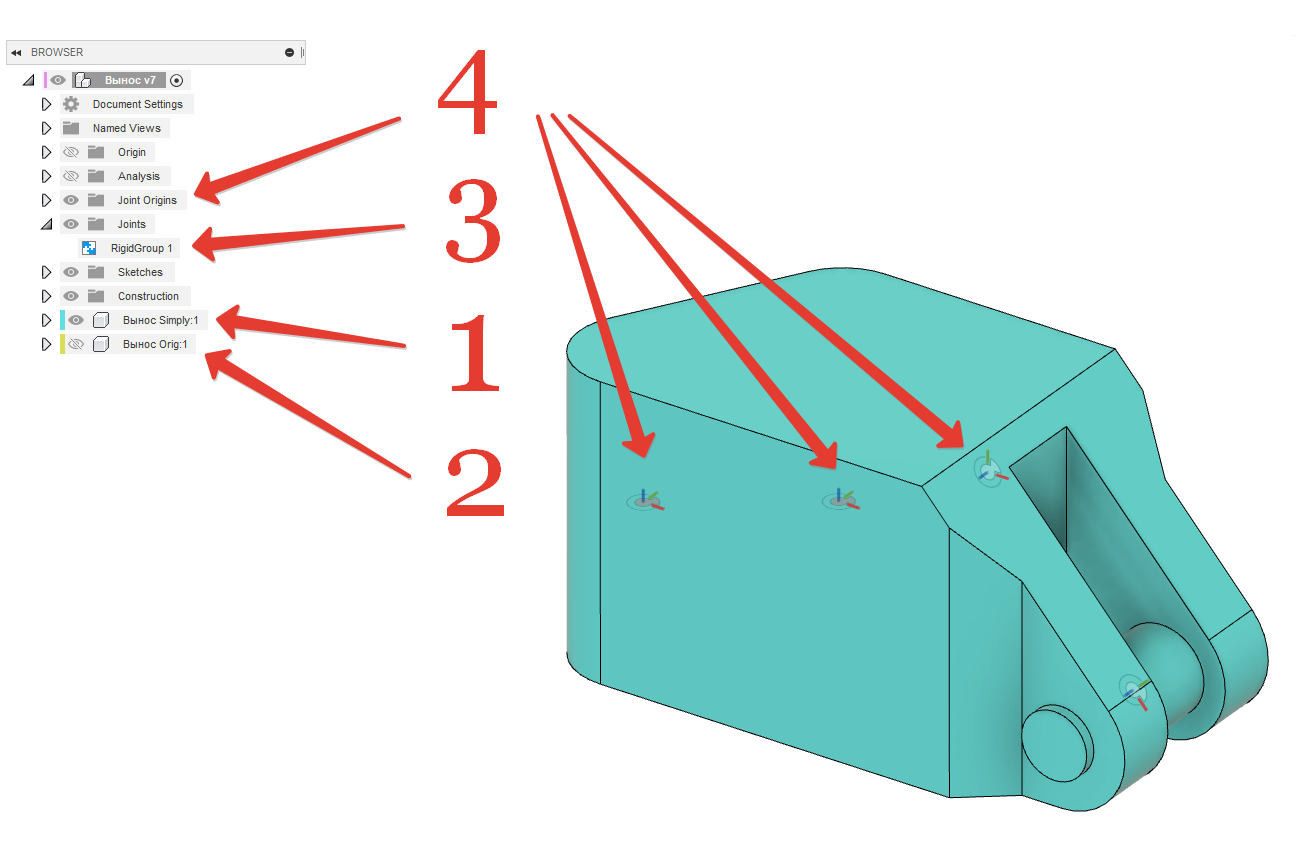
На скриншоте выше показана структура модели, которая будет использоваться в сборке, а затем еще перерабатываться, чтобы сформировать геометрический контекст для задачи генеративного дизайна.
В структуре можно увидеть (1) отдельный компонент, содержащий упрощенную геометрию, (2) компонент с оригинальной импортированной деталью. Оба компонента зафиксированы с помощью (3) соединения RigidGroup с глобальной системой координат модели.
Также видно (4) четыре Joint Origin, которые затем будут использоваться в сборке как точки задания соединений. Их можно размещать также с использованием эскизов, либо ориентируясь на оригинальную геометрию, в случае если соответствующие отверстия или элементы были удалены при упрощении.